Na nosníku o jednom poli lze toto téma snadno znázornit. Níže popíšeme tři statické systémy. Tyto modely jsou zdokumentovány v připojeném souboru.
Konstrukce 1
Staticky stanovený systém (bez podloží), dT = 80 ° na horní straně
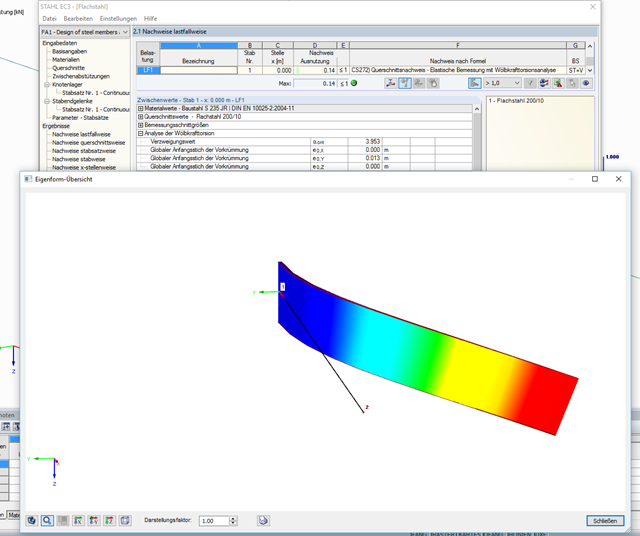
Prut je zakřivený nahoru, ale sám o sobě je bez napětí.
Systém 2a
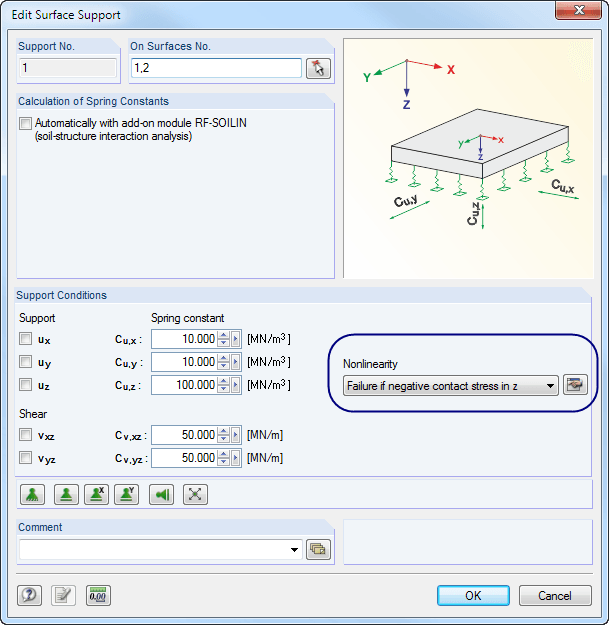
Podobně jako u soustavy 1, ovšem s přídavným podložím prutu. Zadání pružného podloží prutu proběhne bez případné nelinearity.
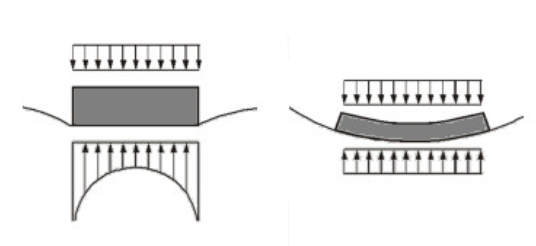
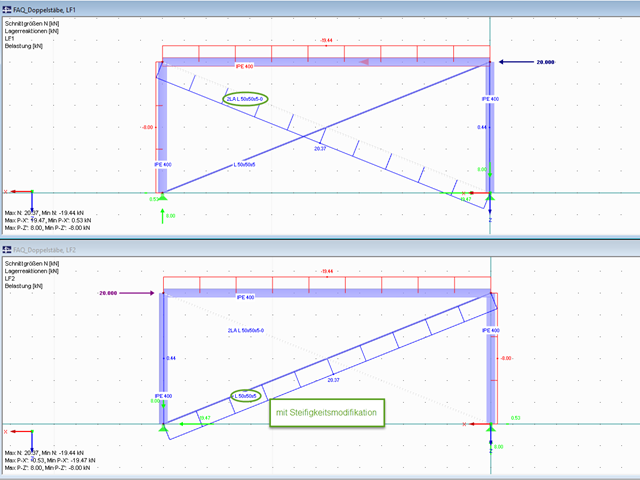
Pokud by se pro systém 2a měla zobrazit napětí sigma_x na prutu, pak by se uvažovalo napětí na horní straně prutu a tah na dolní straně prutu (viz Obrázek 01).
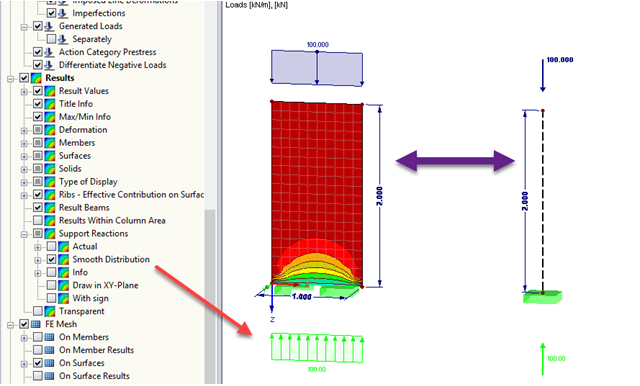
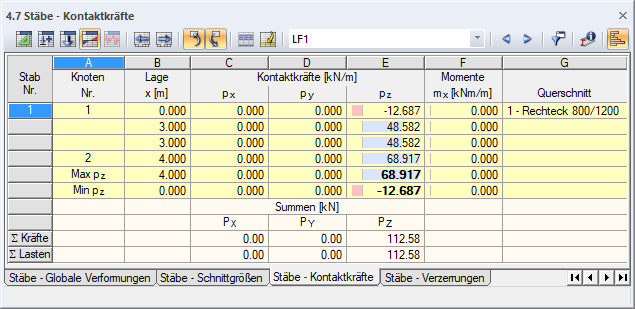
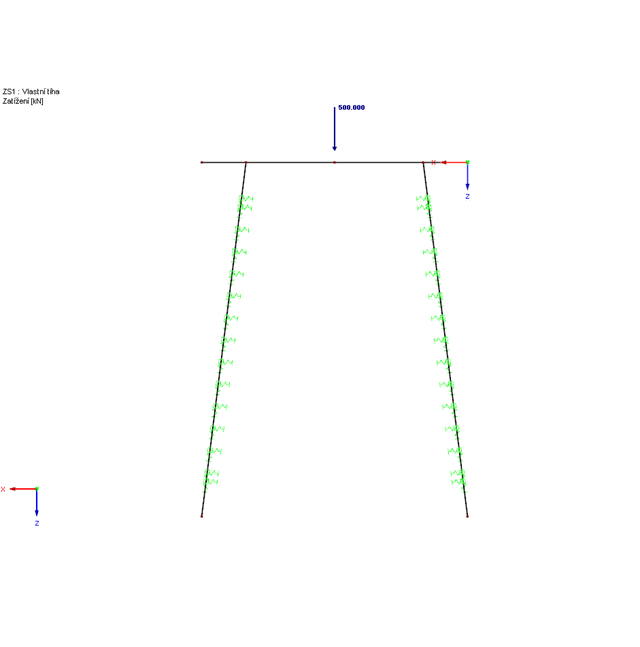
V důsledku zakřivení prutu a existujícího pružného podloží vzniká kontaktní síla p -z, která má zabránit zakřivení prutu směrem nahoru (viz Obrázek 02).
Tyto kontaktní síly p -z (Obrázek 02) jsou způsobeny zakřivením prutu vlivem teploty a působícím podložím prutu. Zobrazené kontaktní síly je možné nahradit zatížením na prut, které je proti zakřivení. To je znázorněno v systému 2b v souboru s příkladem.
Systém 2b
Pružné uložení prutu se odstraní a zadá se proměnné zatížení na prut ve směru Z.
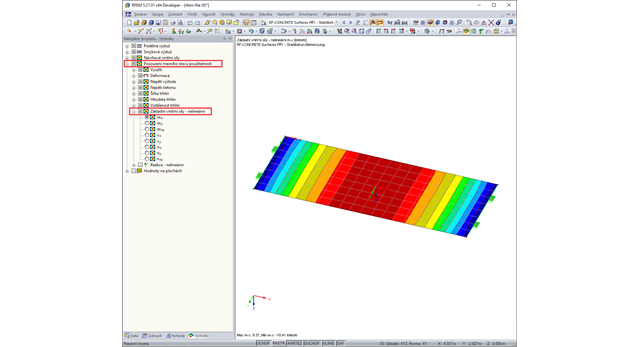
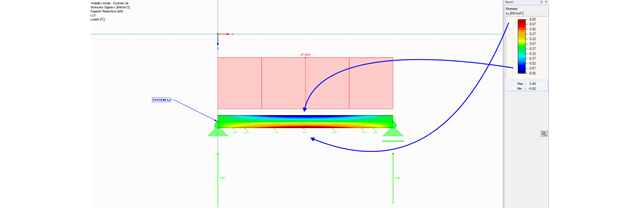
Pokud porovnáme výsledky (např. Deformace u -z) na obou systémech 2a a 2b, dostaneme srovnávací výsledky (viz Obrázek 03).
Kromě toho lze také zobrazit napětí sigma_x pro zařízení 2a i 2b. Ty mají také stejnou hodnotu (viz Obrázek 04).
Systém 3 by měl dokumentovat pouze napětí v důsledku rozdílu teplot na staticky určeném systému (bez podloží).
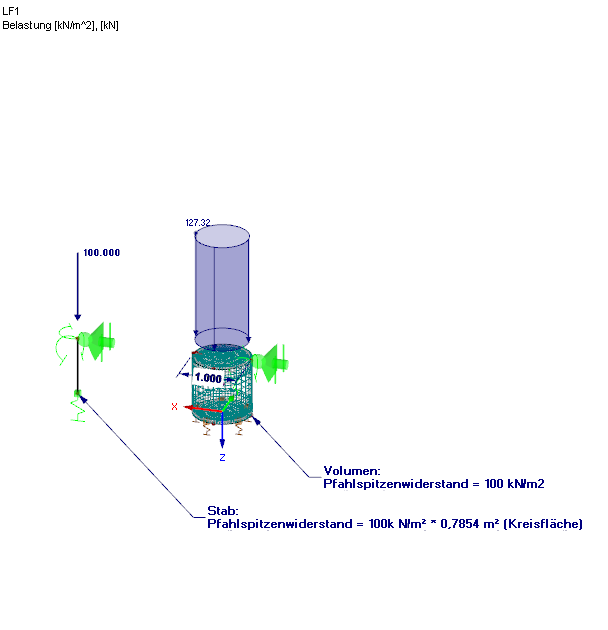
Výsledky z příkladu „nosníku o jednom poli“ lze také přenést na plochy s pružným podložím.
Zobrazit více